To date, most neuro-motor prostheses have been designed for a particular use case: control of reaching via cursor control or a robotic arm. This is practical: the most acute need for a fully paralyzed patient is to regain some of the function normally provided by the arm.
We presume, based on recent progress, that reach-based prostheses will be successful. If so, we believe patients will desire what most of us take for granted: the ability to use arm motor cortex to guide reach-like actions, and leg motor cortex to guide locomotion.
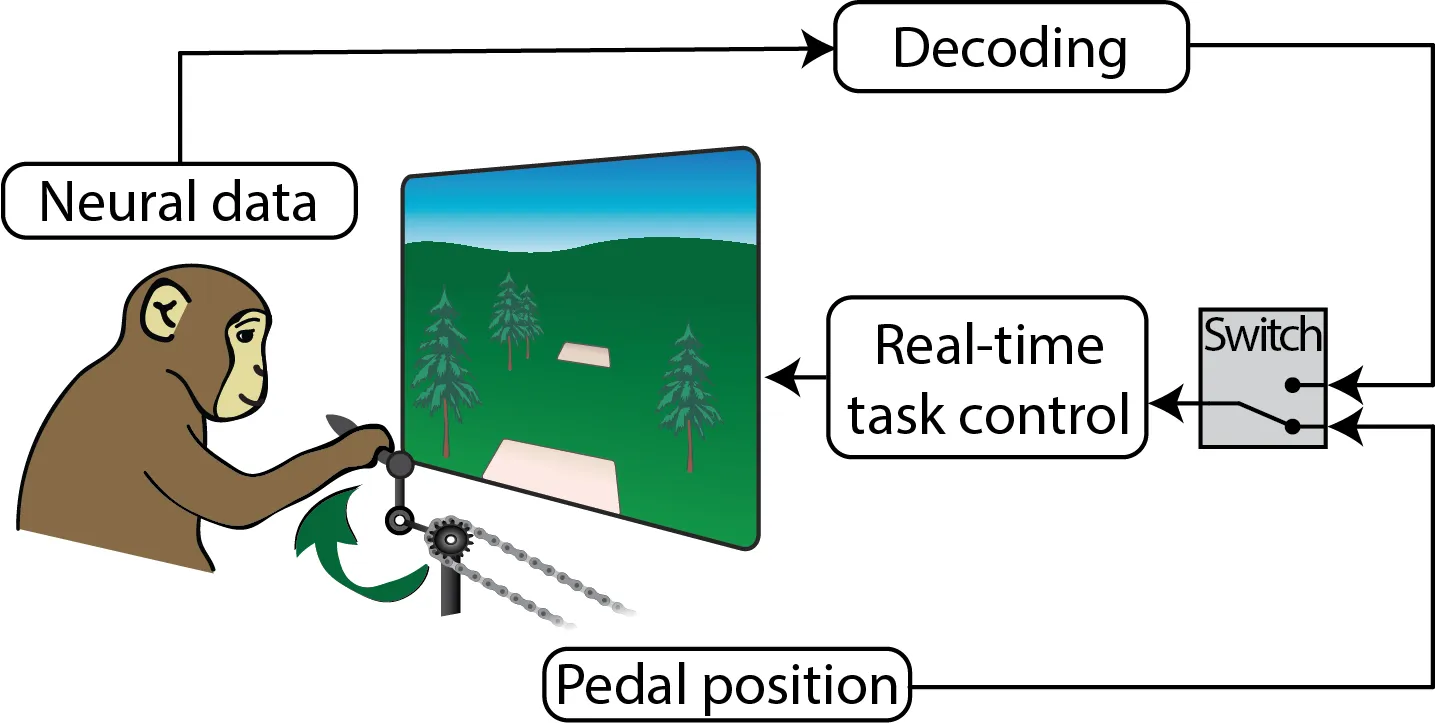
Locomotion involves rhythmic movement. We find that rhythmic movements produce patterns of neural activity that require their own dedicated decode strategies. Yet while different strategies must be used, robust rhythmic activity provides an excellent substrate for accurate decode.